New Releases
jGRASP version 2.0.6 Beta includes dark themes.
The jGRASP Plugin for Eclipse version 1.0.0 Beta 6 adds support for the Eclipse dark theme.
jGRASP version 2.0.5_08 Beta is our first release that is bundled with OpenJDK (also Checkstyle and JUnit 4).
Microsoft OneDrive On-Demand Problems
If you are attempting to compile Java source files from a OneDrive folder on Windows 10, the compile may fail with a "not a file" message. You can correct this by turning off "Files on Demand" in the OneDrive settings, if you have sufficient disk space for all your OneDrive files. Otherwise, you will need to copy the source files to a normal folder to work on them, then back to the OneDrive folder when done.
About jGRASP
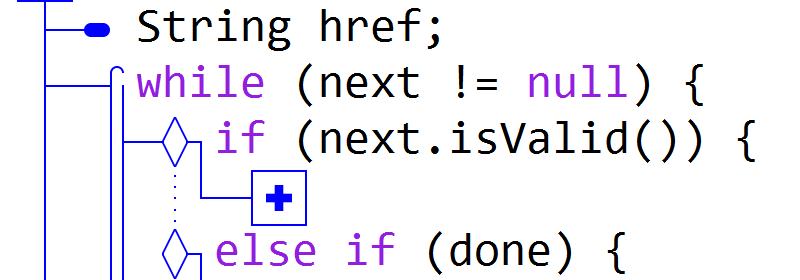
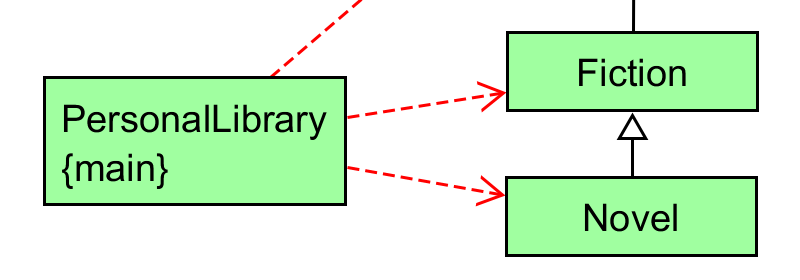
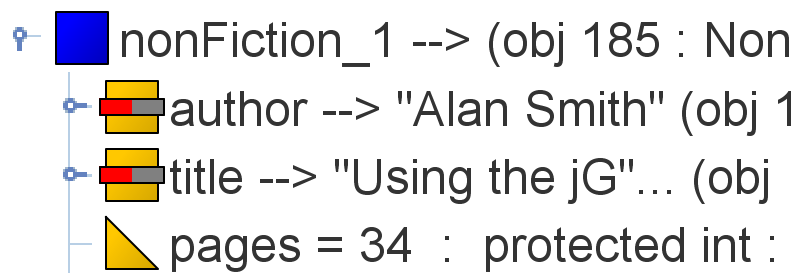
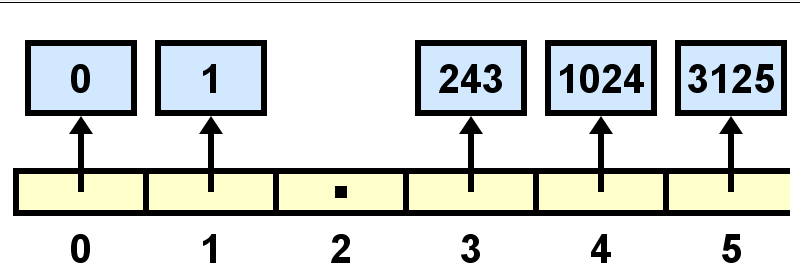
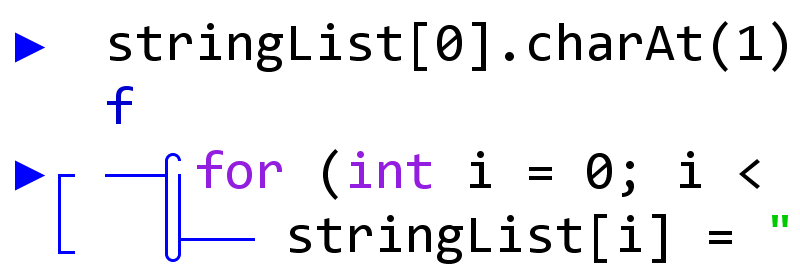
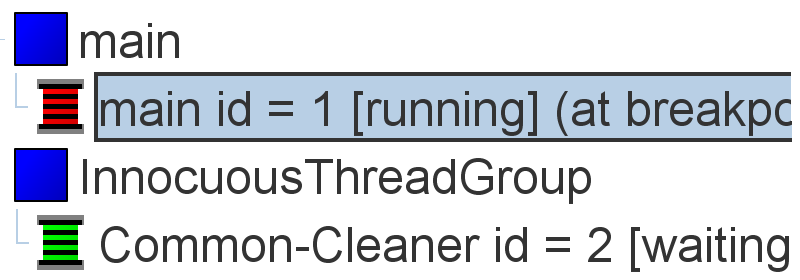
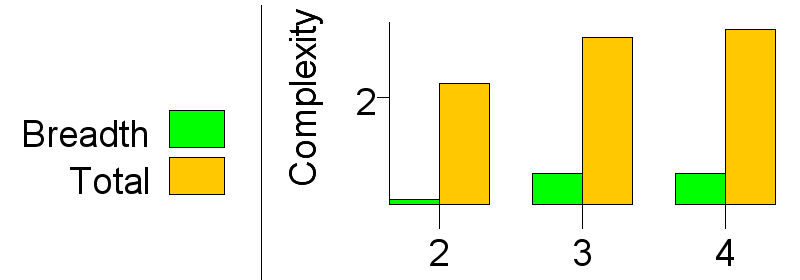
jGRASP is a lightweight development environment, created specifically to provide automatic generation of software visualizations to improve the comprehensibility of software. jGRASP is implemented in Java, and runs on all platforms with a Java Virtual Machine (Java version 1.5 or higher). jGRASP produces Control Structure Diagrams (CSDs) for Java, C, C++, Objective-C, Python, Ada, and VHDL; Complexity Profile Graphs (CPGs) for Java and Ada; UML class diagrams for Java; and has dynamic object viewers and a viewer canvas that work in conjunction with an integrated debugger and workbench for Java. The viewers include a data structure identifier mechanism which recognizes objects that represent traditional data structures such as stacks, queues, linked lists, binary trees, and hash tables, and then displays them in an intuitive textbook-like presentation view.
jGRASP is developed by the Department of Computer Science and Software Engineering in the Samuel Ginn College of Engineering at Auburn University.
Note on Tutorials
We are in the process of updating the tutorials for jGRASP 2.0. The four updated tutorials that are available now cover most of the new features.
Acknowledgments
The development of jGRASP has been supported by a research grant from the National Science Foundation.
The development of previous versions of GRASP was supported by research grants from NASA Marshall Space Flight Center, the Department of Defense Advanced Research Projects Agency (ARPA), and the Defense Information Systems Agency (DISA).